1 引 言
混合动力汽车(hev)表示有多种动力参与汽车驱动,一般指的是燃油发动机和电机这两种动力。目前,国内和国际上对混合动力汽车的研究和开发方兴未艾,这种车综合了传统汽车引擎驱动与电机驱动的两大优点。主要能源仍然是汽油、柴油。混合动力汽车既充分发挥了燃料发动机持续工作时间长、动力性好的优点,又可以发挥电动机无污染、低噪声的好处,具有低油耗、低污染的特性。并且,混合动力汽车可以在运行过程中维持电量的均衡,不像纯电动汽车需要配备专用的充电器等配套设备。在不远的将来,混合动力车将与传统燃油车、纯电动车形成三足鼎立的局面。
混合动力汽车在传统的燃油车的基础上,新增了电机、电池等部件,从而需要电机控制器、电池管理系统、能源总成控制系统对发动机、电机进行协调控制,使各设备工作在高效区,提高能源的利用率,使整车性能最佳。传统燃油车内的制动控制器、变速器控制器、发动机ecu(engine controlunit)等电控设备、仪表仪器采用can总线进行通讯,can总线具有实时性强、传输距离远、抗电磁干扰能力强、成本低、多主站等特点,混合动力汽车沿用燃油车的传统,新增的电机控制器、电池管理系统、能源总成控制系统也采用can总线联成一体,进行信息的交换。
2 can总线技术简介
can(controller area network)是一种先进的串行通信协议,它最初是为了解决汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通讯总线,属于现场总线范畴。1993年can总线成为国际标准(iso11898:道路车辆的高速控制局域网数字信息交换标准),它有效支持分布式控制及实时控制,并采用了带优先级的csma/cd协议对总线进行仲裁。因此,can总线允许多站点同时发送,这样,既保证了信息处理的实时性,又使得can总线网络可以构成多主结构的系统,保证了系统的可靠性。另外,can采用短帧结构,且每帧信息都有校验及其他检错措施,保证了数据的实时性、低传输出错率。其传输介质可以使用双绞线、同轴电缆或光纤。
3 混合动力汽车can总线网络
下面以长丰cfa6470hev混合动力汽车为例加以讨论。cfa6470hev以cfa6470g四轮驱动越野车为平台,去掉了分动箱,发动机仅驱动后桥,电机以镍氢动力电池为能源驱动前桥,前轮、后轮通过地面摩擦力达到速度一致。能源总成控制系统根据整车的状态协调控制发动机的启停、电机的出力。整个cfa6470hev功能结构图如图1所示。
针对cfa6470hev混合动力汽车,我们组建了如图2所示的cfa6470hev混合动力汽车can控制网络。
其中能源总成控制系统、电机控制器以tms320lf240x(参见ti公司:tms320lf24xadspcontrollers reference guide,1999)系列数字信号处理器为cpu,电池管理系统、数据采集显示器以89c52为cpu。其各节点间的数据信息流图见图3。
4 混合动力汽车能源总成控制系统can接口设计
混合动力汽车能源总成控制系统作为混合动力汽车的中央处理器,要求实时性高、运算能力强,且要与can总线相连,故其cpu选用ti公司内嵌can控制器的tms320lf2407a。
4.1 tms320lf2407acan控制器简介
tms320lf2407a的can控制器模块是一个完全的can控制器,该控制器是一个16位的外设模块,完全支持can2.0b协议,支持数据帧、远程帧,可工作在标准模式或扩展模式下,它采用邮箱发送、接收数据,对接收邮箱可配置接收屏蔽字,可编程位定时器、可编程中断配置、可编程can总线唤醒功能,自动回复远程请求,当发送出现错误或仲裁时丢失数据时,can控制器自动重发,具有总线错误诊断功能,可工作在自测试模式下。
tms320lf2407a的can控制器采用邮箱机制发送、接收数据,有别于一般的can控制器。一般的can控制器(如sja1000)只有一个发送数据区、一个接收缓冲区,再加64字节接收缓冲区,当发送不同标识符数据帧时,须改变标识符寄存器。当接收不同标识符数据帧时,屏蔽寄存器须对不同标识符的数据帧都开放。而tms320lf2407a的can控制器有6个邮箱,其中2个接收邮箱(mbox0、1),2个发送邮箱(mbox4、5),2个可配置为接收或发送邮箱(mbox2、3),每个发送邮箱相当于一个发送数据区,每个接收邮箱等同于一个接收数据区,使得tms320lf2407a在不改变标识符寄存器或接收屏蔽寄存器的情况下最少可接收2帧(最多4帧)不同标识符的数据帧,最少可发送2帧(最多4帧)不同标识符的数据帧,但不可同时为最多,这对发送、接收数据帧类型不多的can节点很适用。 [page]
tms320lf2407a的can控制器有15个16位的控制寄存器,这些寄存器控制着can的位定时器、邮箱的发送或接收使能、错误状态及can的中断等。详细资料见参考文献1。
4.2 can接口硬件设计
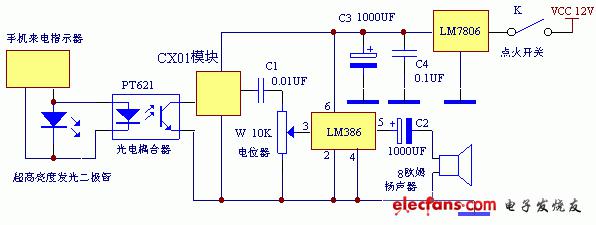
can接口硬件电路如图4所示,tms320lf2407a的can控制模块通过高速光电隔离模块(两片高速光电隔离器6n137)与can收发器pca82c250相连。
4.3 can接口软件设计
can接口软件分初始化程序、数据发送程序、中断接收程序三大块。数据解释功能由主程序完成。
4.3.1 初始化can控制器
根据整车要求,混合动力汽车能源总成控制系统需接收4种不同标识符的数据帧、发送两种不同标识符的数据帧,因此,我们将tms320lf2407a的mbox2、3配置成接收方式,在初始化程序中一次配置好标识符、接收屏蔽字。于是,初始化程序完成波特率、邮箱标识符、接收屏蔽字、不使能发送中断、使能接收中断等配置功能,其初始化流程见图5。
4.3.2 发送数据
由于邮箱标识符已在初始化程序中一次性配好,发送程序只将待发送的数据写入相应邮箱的数据区,设置发送请求位启动发送,待发送完毕,复位发送应答位即可。其数据发送流程见图6。
4.3.3 中断接收数据
中断接收服务程序置相应数据接收标志,并复位接收悬挂位和接收中断标志位。主程序中根据数据接收标志读取数据并解释数据。这样可减少中断服务程序占用cpu的时间。
5 tms320lf2407acan接口电路设计的关键问题
为了进一步抑制干扰,can总线接口中往往采用光电隔离电路。光电隔离器一般位于can控制器与收发器之间。混合动力汽车能源总成控制系统的can总线接口中采用了高速光隔6n137光电隔离器。但是光电隔离电路增加了can总线有效回路信号传输延时时间,导致速率距离积减少,can收发器(如82c250/251等)本身具有瞬间抗干扰能力,保护总线、降低射频干扰(rfi)以及实现热防护的能力。因此,在干扰不严重的应用场合,可考虑不加光电隔离,以使系统达到最大的通信速率或距离。若要使用光隔电路,也要尽量选用高速光电隔离器件,以减少can总线有效回路信号传输延时时间,同时82c250的发送信息输入脚txd(第1脚)必须接上拉电阻。
6 结束语
本文所组建的cfa6470hev混合动力汽车can网络,数据通信可靠,所设计的混合动力汽车能源总成控制系统运行稳定实时性强,已成功应用于湖南省“十五”计划重点攻关项目:长丰集团cfa6470hev混合动力汽车。
参考文献
1 刘和平,等.tms320lf240x dsp结构、原理及应用.北京:北京航空航天大学出版社,2002
2 陈清泉,孙逢春.混合电动车辆基础.北京:北京理工大学出版社,2001
3 邬宽明.can总线原理和应用系统设计.北京:北京航空航天大学出版社,1996 (end)








 热门文章
更多
热门文章
更多

 无人驾驶汽车的秘密.是谁操控着方向盘?
无人驾驶汽车的秘密.是谁操控着方向盘?






 app下载
app下载